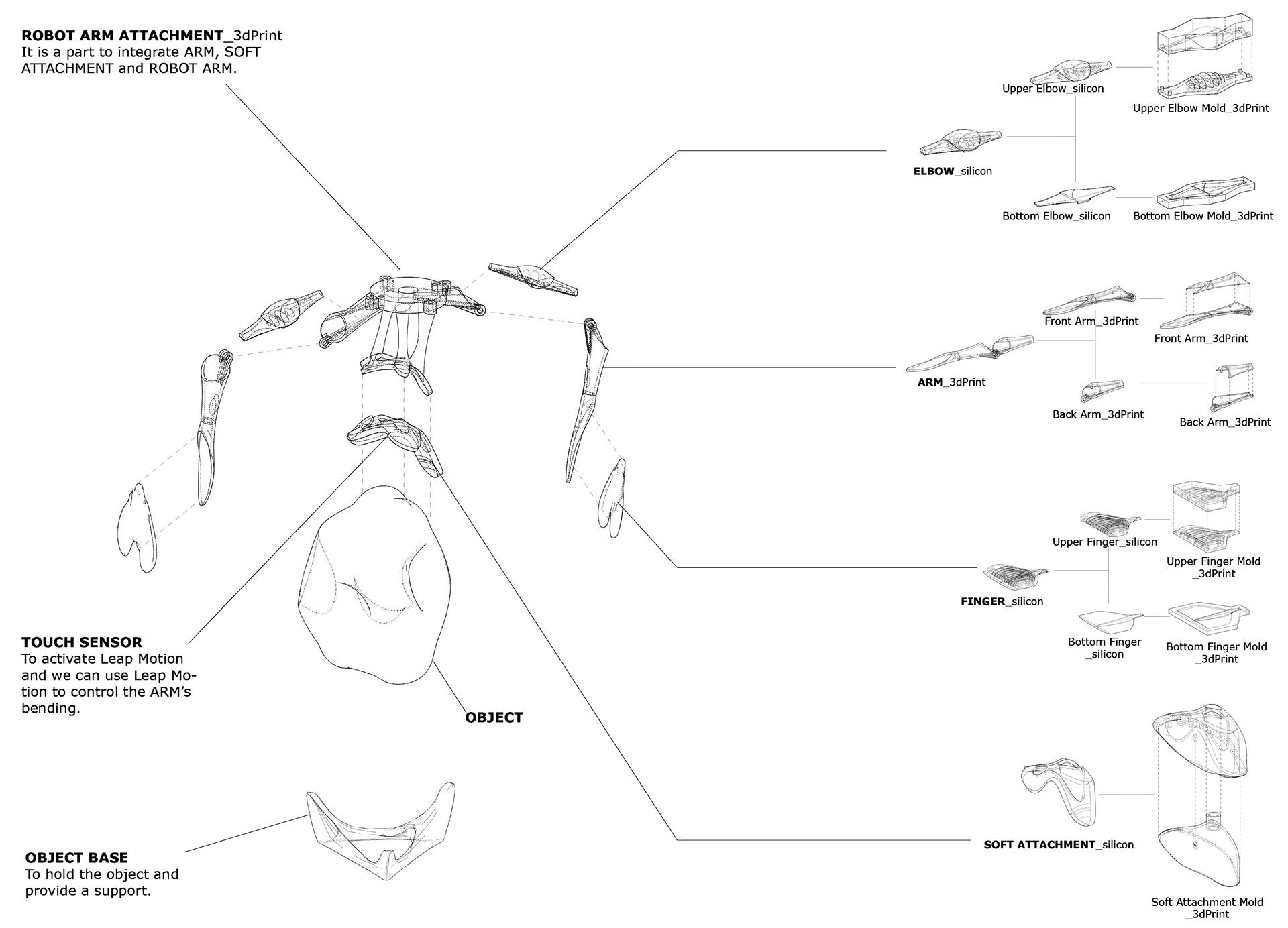
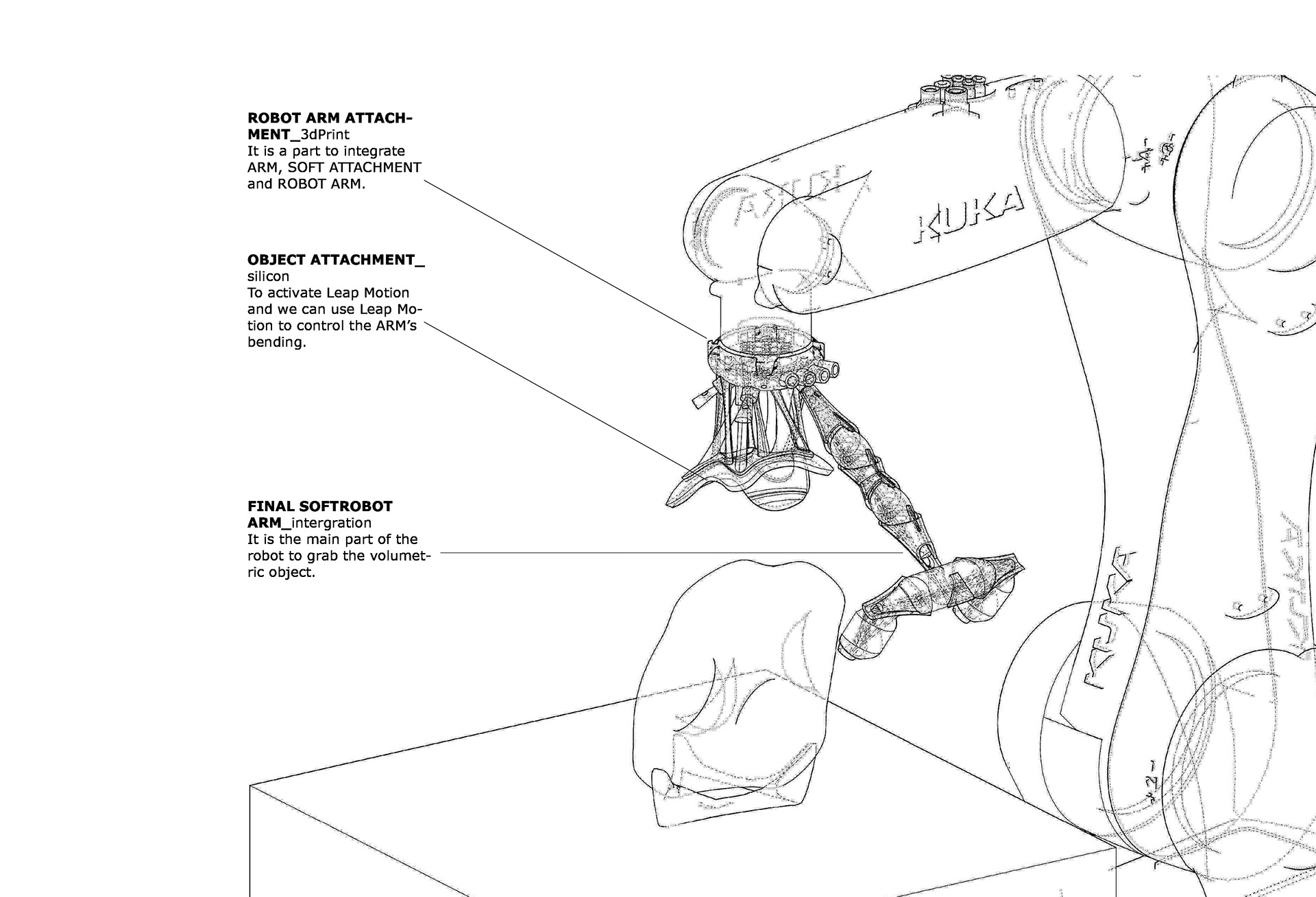
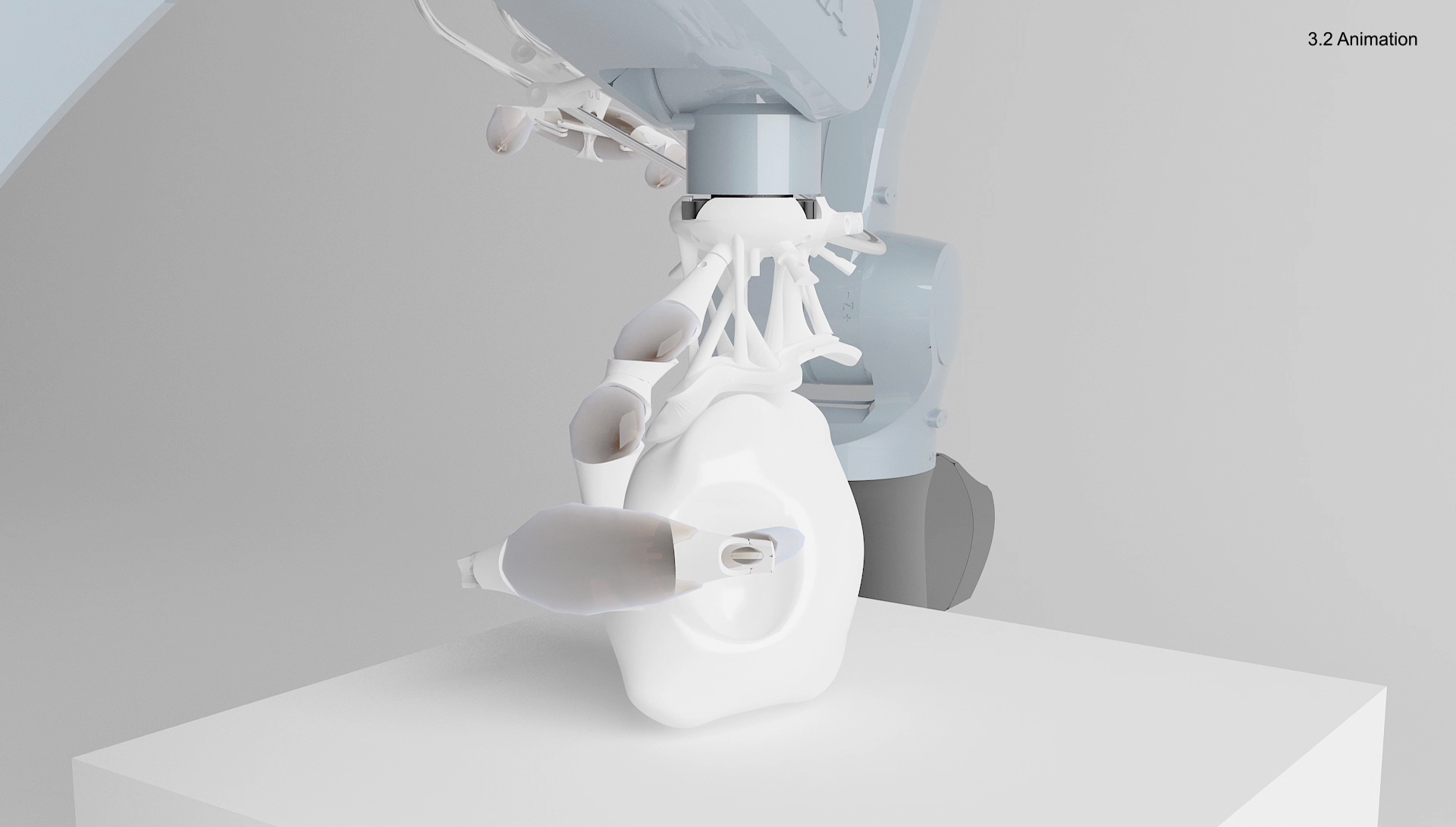

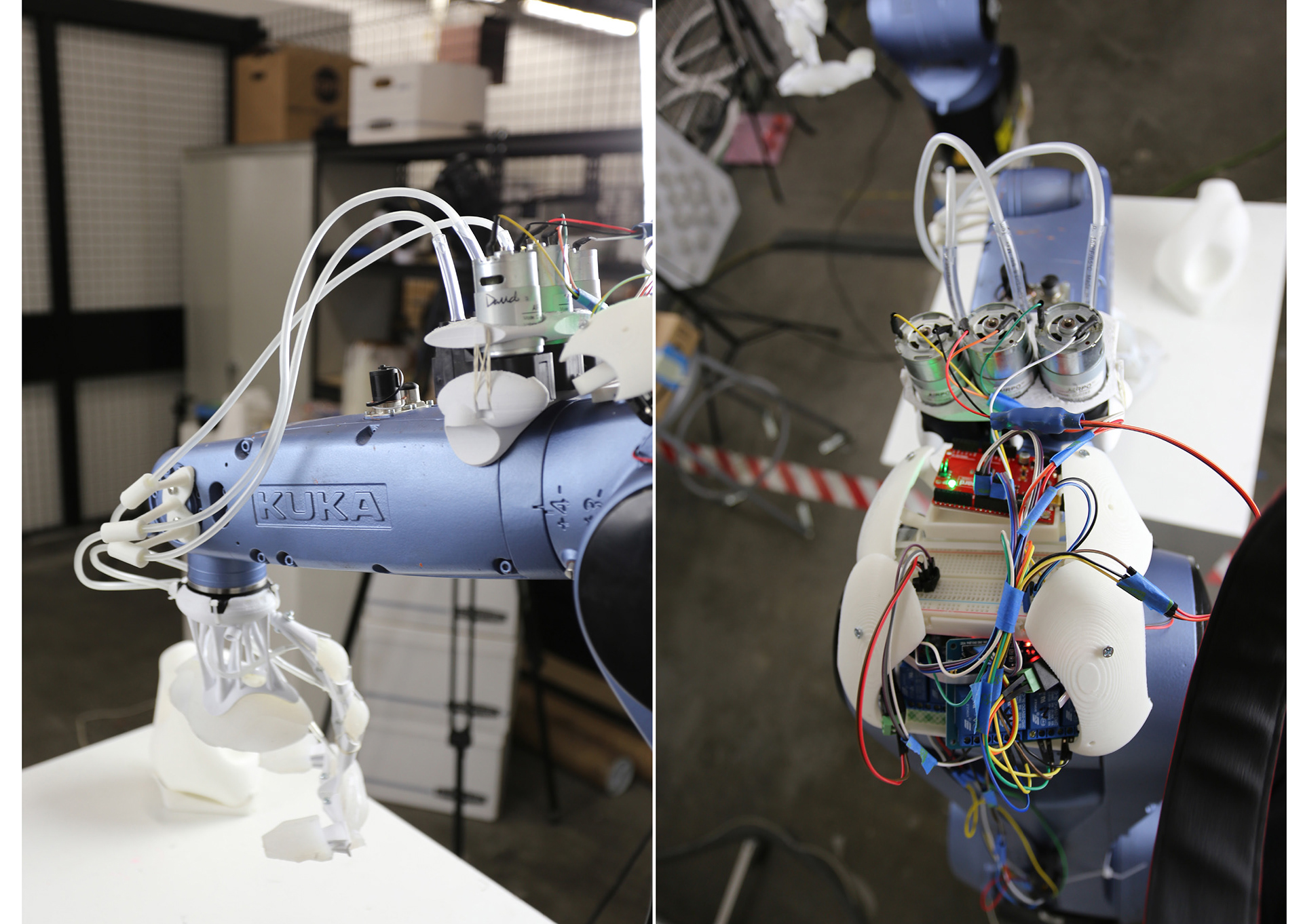
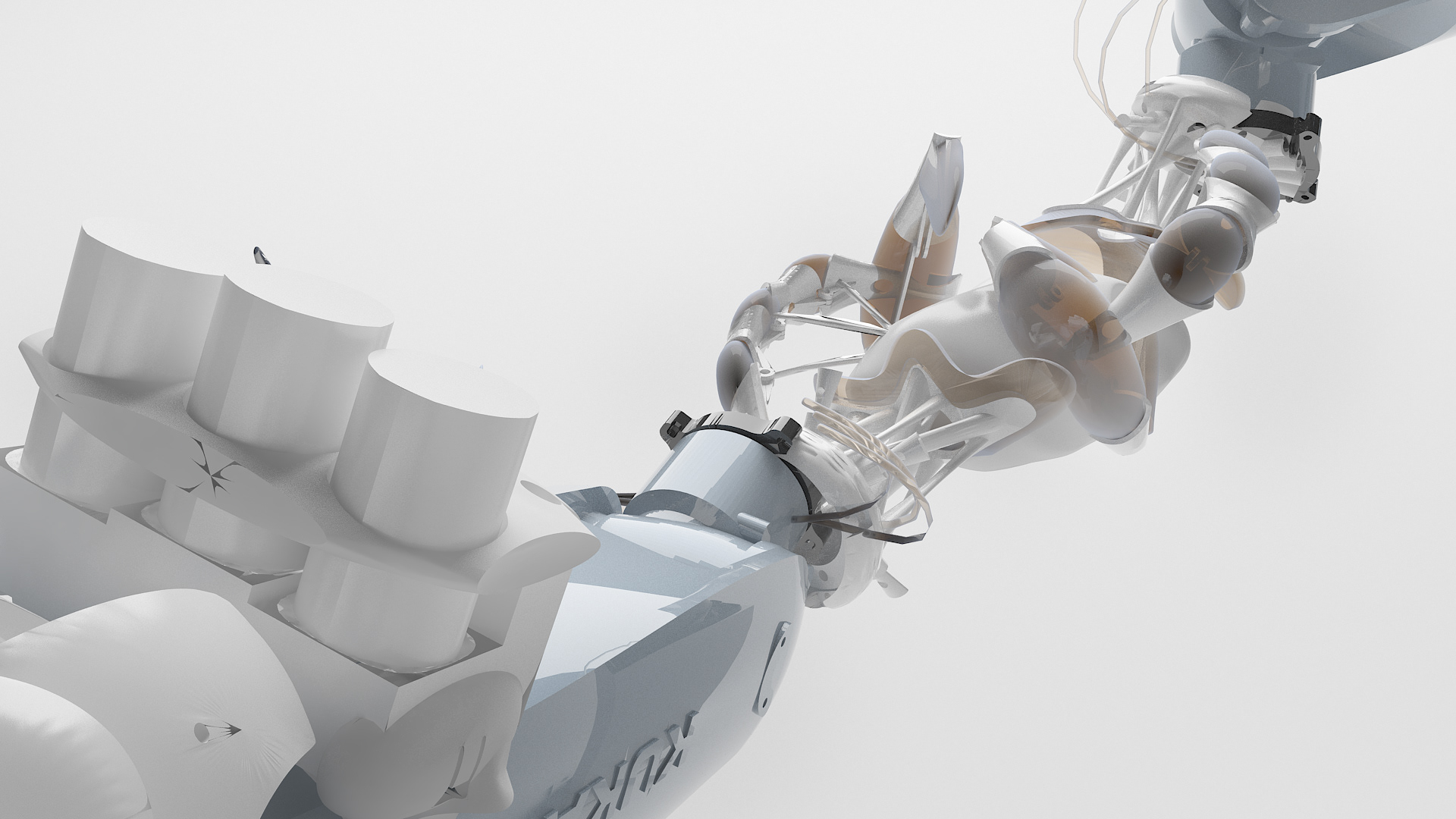

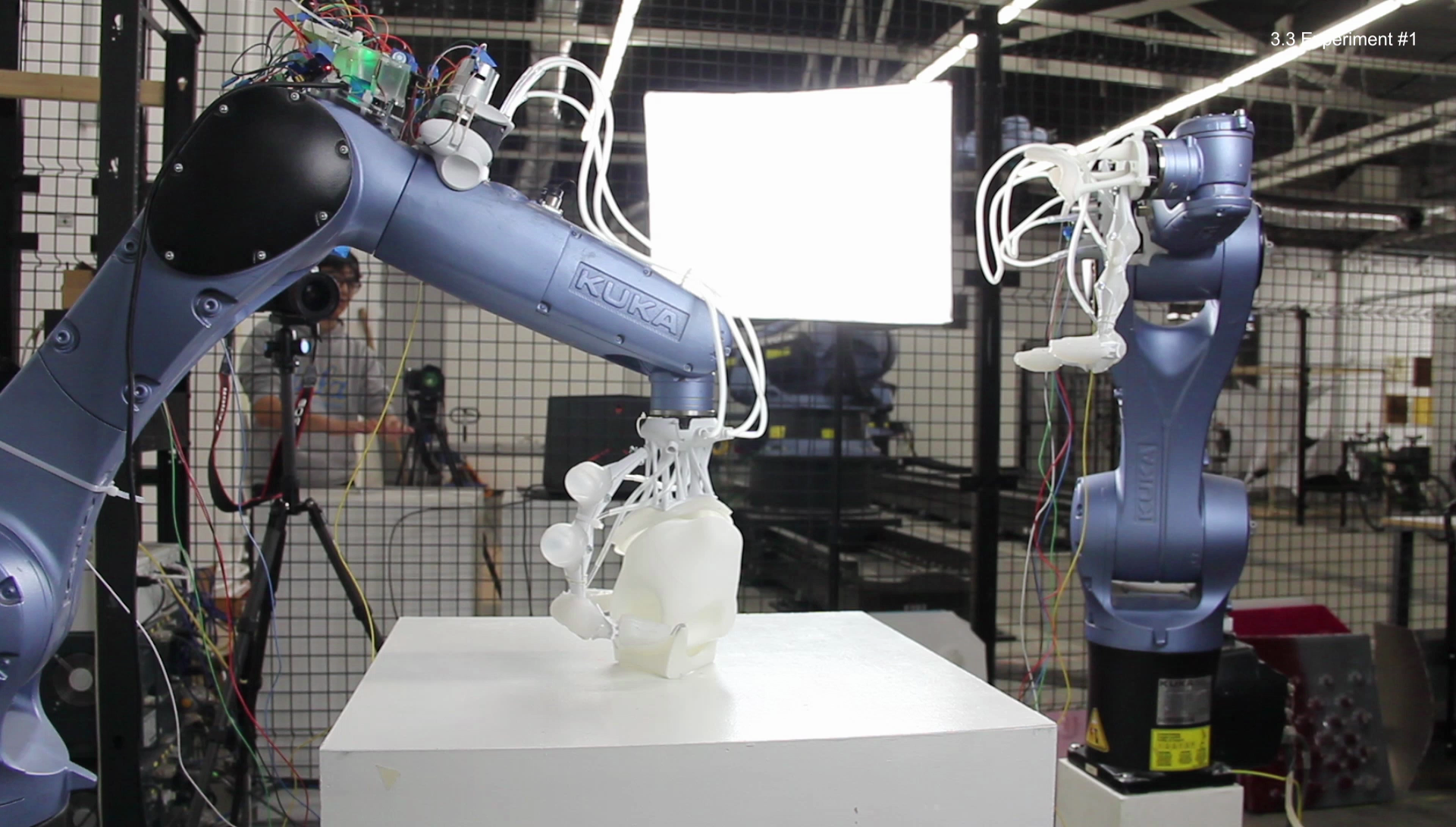

This project challenges the current abilities of soft robotics in the realm of dexterity and autonomous interaction. A prosthetic device was added to the KUKA arm which could interact with a common object. The creviced bulbous object directed the design of the prosthetic, leading us to develop a hard limb-soft joint prosthetic which would be able to grab onto the object in order to pick it up and move it. We found it best to mimic one of the few devices equipped to deal with such objects - the hand and fingers. Composed of hard 3D printed parts connected by soft inflatable silicone joints, the silicone robot deforms when triggered by touch sensors to inflate and re position the 3D printed limbs in order to grab the object, mimicking the action of a thumb and index finger. This project was done in collaboration with Zhe Liang, Alara Akiltopu and Zhiyu Zhang.