

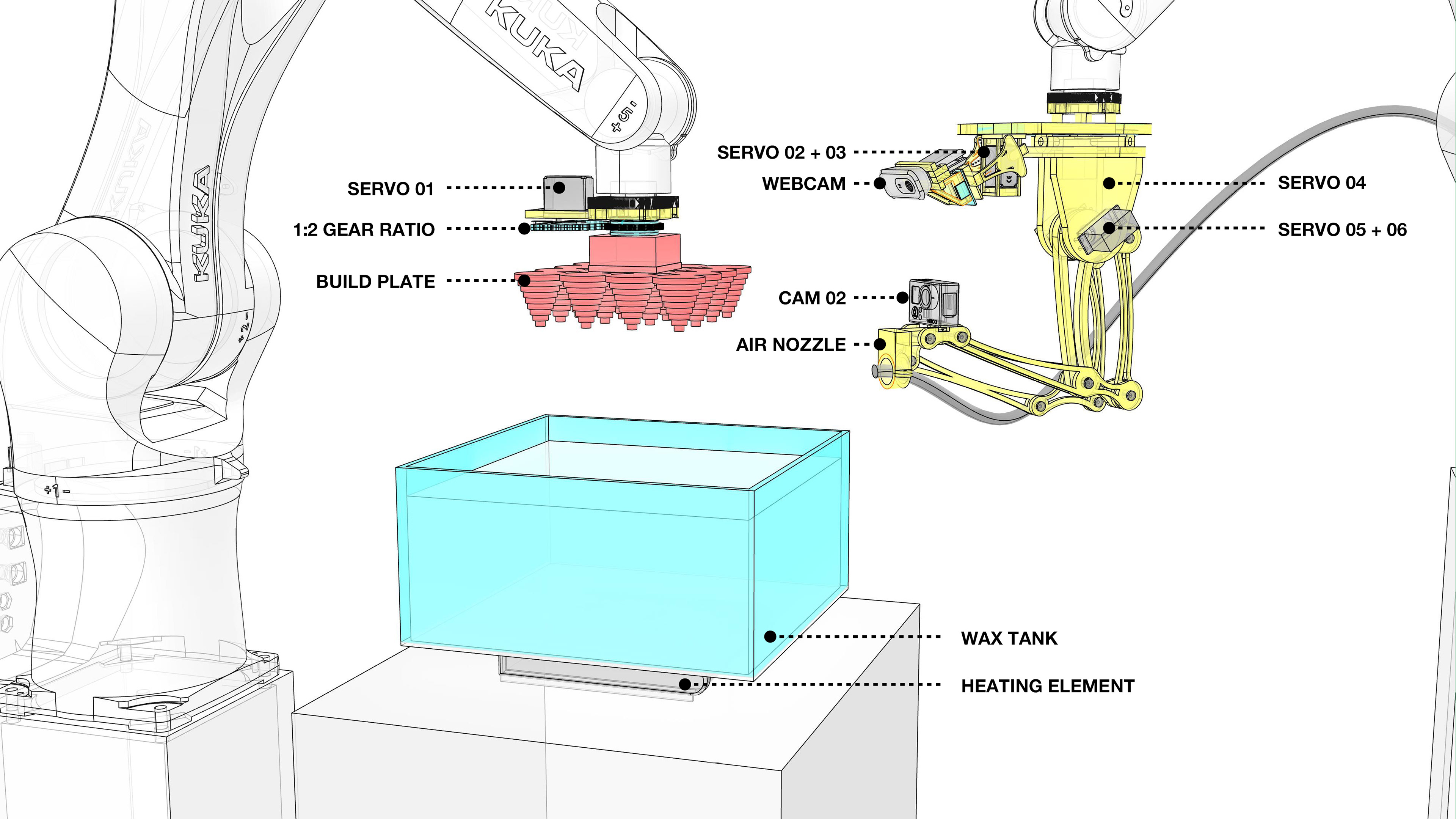
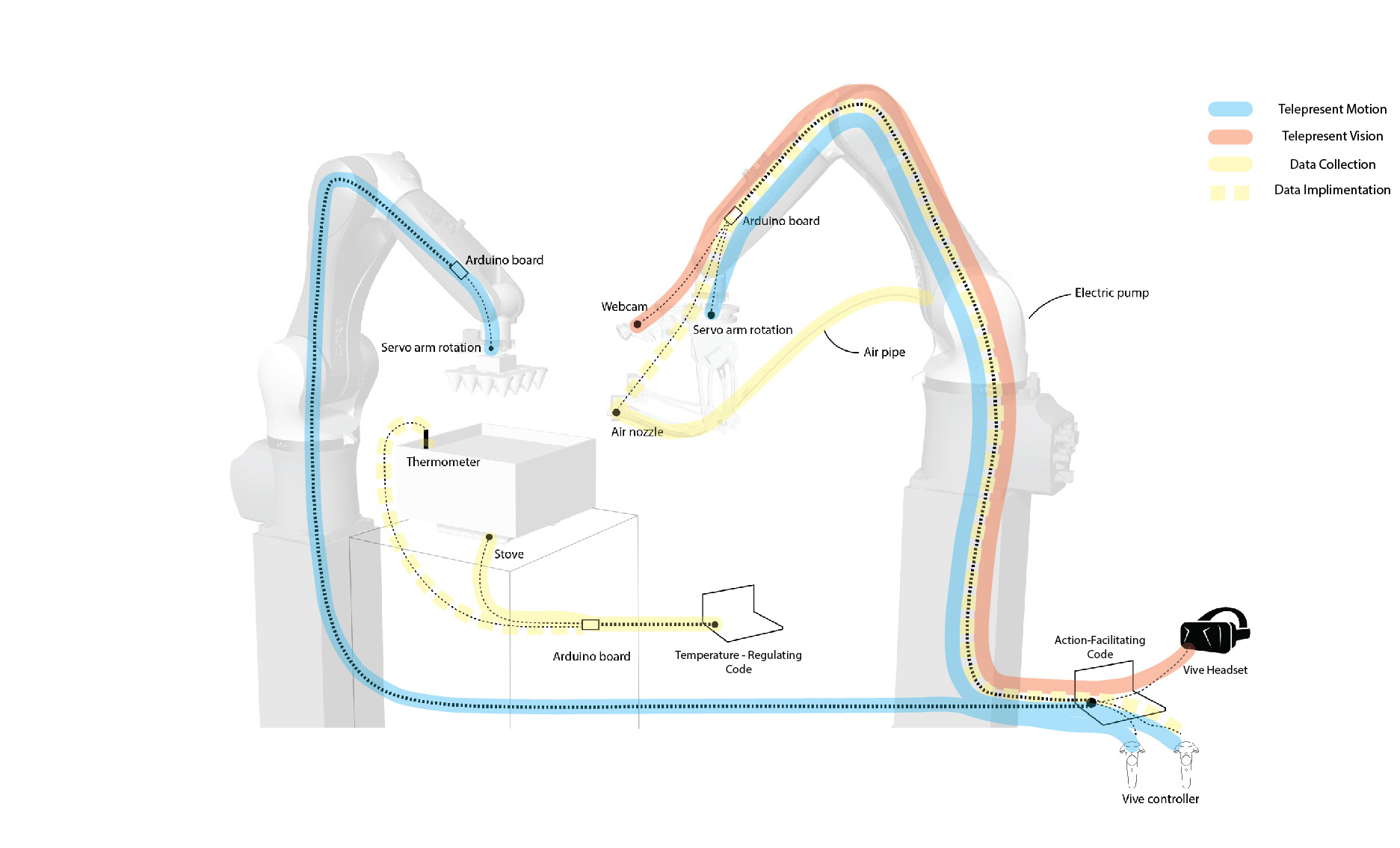
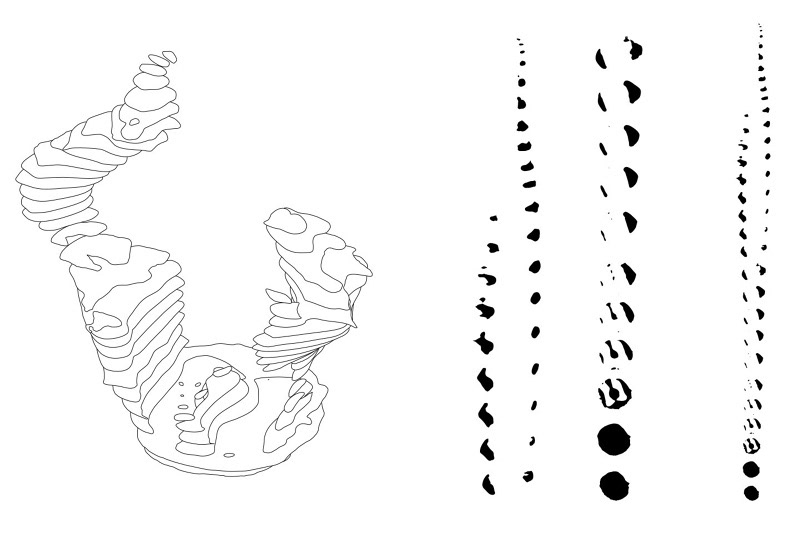



Wax Assembly represents a conversation between robotic precision, human craft, and entropic material behavior. The objective was to develop an end effector for the Agilus KUKA robot that could be controlled in real time by users during the fabrication process. Using wax and working with its rapid material phase change properties, the KUKA arm attempts to fabricate a column through the process of cumulative aggregation and multi-directional massing. Midway during the KUKA controlled dipping action, the process is intercepted by human intervention in the form of various environmental alterations such as gravity shift, air flow rate and material temperature and density, in an attempt to push it into a new typological structure. We therefore acheive complexity within the vertical structure in the form of branching and twisting of each individual arm. This project was done in collaboration with Tyson Phillips, Yue Yang, Long Teng and Taira Tsukioka